Currently, the world farming has become expensive to use large mechanical machines. Back in the days, when the mechanical machines for agriculture were invented, they became very useful for developed and developing countries. Unfortunately, these machines became very big and heavy, bringing soil compaction issues on the farm and expensive maintenance that needs skilled labor. You may be unlucky if the machine breaks while working on the farm. Maintenance may take days exposing products to external elements and hostile environments.

Mr. Kadeghe Fue sitting on the rover of Autonomous Cotton Harvesting Robot. This was in 2018 when they were jointly working with Georgia Tech students to test leaf and soil sampling robotic systems. This rover can be assigned to do multiple jobs which makes it cost-efficient multipurpose machine
For cotton harvesting, the latest version released by the leading cotton picker manufacturing companies costs more than $750,000 (1.7 Billion TShs). The machines are expensive because they are required to pick, clean and pack the cotton bolls. These processes involve expensive machinery to accomplish. Unfortunately, the cost of the machine prevents most people who would like to do cotton production to avoid it. Also, cotton is only harvested after it has been defoliated using chemical defoliators which have been shown to affect the soil and microbial living.
Now, it has become necessary to come up with alternative technology to resolve the situation. We need a machine that is small but efficient in picking the bolls. Also, we need a multipurpose machine that can be assigned multiple jobs on the farm like sawing, weeding, spraying, and other farm operations. This would solve the issue of owning a $750k machine that just sits for 9 months under the shed to wait for harvesting only.
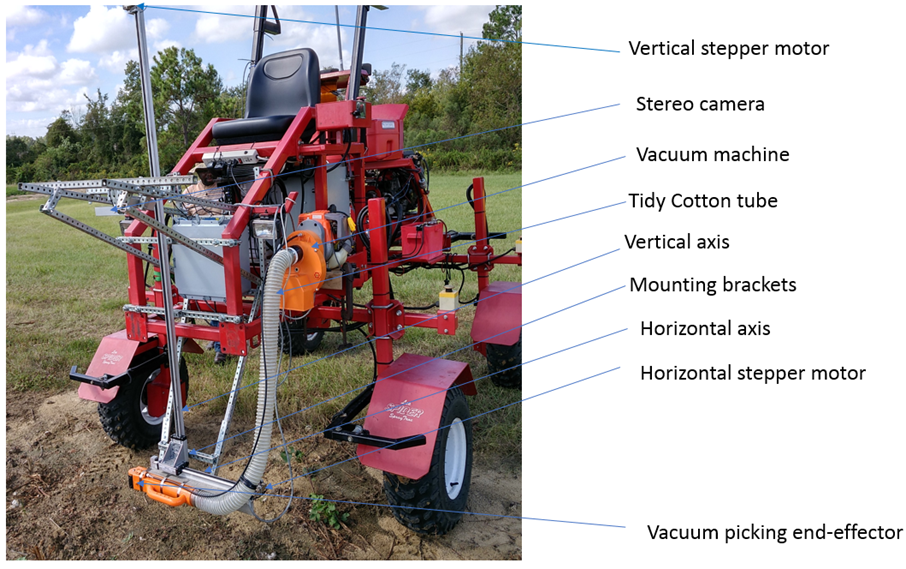
Figure 1. The preliminary design of Autonomous Cotton Harvesting Robot (January 2018)
The cotton incorporated which is a non-profit organization funded by the United States (U.S) cotton farmers and the U.S cotton Board decided to take the initiative to promote next-generation technology of cotton harvesting by funding leading researchers in reputable cotton belt universities in the U.S. One of these institutions is the University of Georgia which is land-grant university funded by the state of Georgia, and leader in agricultural researches.
One of the researchers involved in this initiative is Dr. Glen Rains, who is an agricultural and automation engineer with over seven patents and several peer-reviewed papers on automation of agricultural machinery. Dr. Rains recruited Mr. Kadeghe Fue, a lecturer from the Sokoine University of Agriculture (SUA) to be one of his Ph.D. researchers on robotic systems for cotton harvesting in 2017.
Kadeghe is registered as the Ph.D. candidate at the School of Electrical and Computer Engineering, College of Engineering and he was employed to work for Dr. Rains at the Department of Entomology, College of Agricultural and Environmental Sciences. His research station is located in Tifton, Georgia, United States. Kadeghe is involved in all robotic machinery design and development. Kadeghe designs the hardware and programs the autonomous behavior of the robot. This robot is known as an Autonomous Cotton Harvesting Robot (Figure 1 and 2).

Figure 2. Robotic system picking the bolls at the preliminary testing site in Tifton, Georgia (May 2018)
All the work done under this funded project would be open-sourced as directed by the Cotton incorporated, and hence, the developing world countries like Tanzania can also adapt and develop their own machines.
The Cotton Incorporated has been so kind to emphasize this initiate since they believe it is important, and it gives a chance to the society to own the robot and hence improve it with time. This would easily make the machine cheap, and hence, more farmers will join the cotton industry.
This machine is envisioned to behave autonomously by going into the field and harvest the cotton with little or no intervention of humans.
Recently, Kadeghe, his advisor Dr. Rains and other researchers published an article on “Visual control of Cotton-picking rover and manipulator using a ROS-independent finite state machine (SMACH)” which was also presented in 2019 American Society of Agricultural and Biological Engineers (ASABE) international meeting which is one of the most prestigious conference for agricultural engineering researchers. (access the article in the following link: https://elibrary.asabe.org/abstract.asp?aid=50458&t=3&redir=&redirType=)
In this paper, they are proposing the use of open-source tools and software on the development of the robot using an old and mature technique of the finite state machine. This is a structured technique (Figure 3) in which complex machines can be well organized to execute a certain task. Such a task-based operation needs to have a well-defined procedure that can interact when certain events happen. This makes the robotic system robust and can sustain disturbances when it is on the operation with low level of failures. This robot is using three cameras, and it has an end-effector that is vacuum powered.
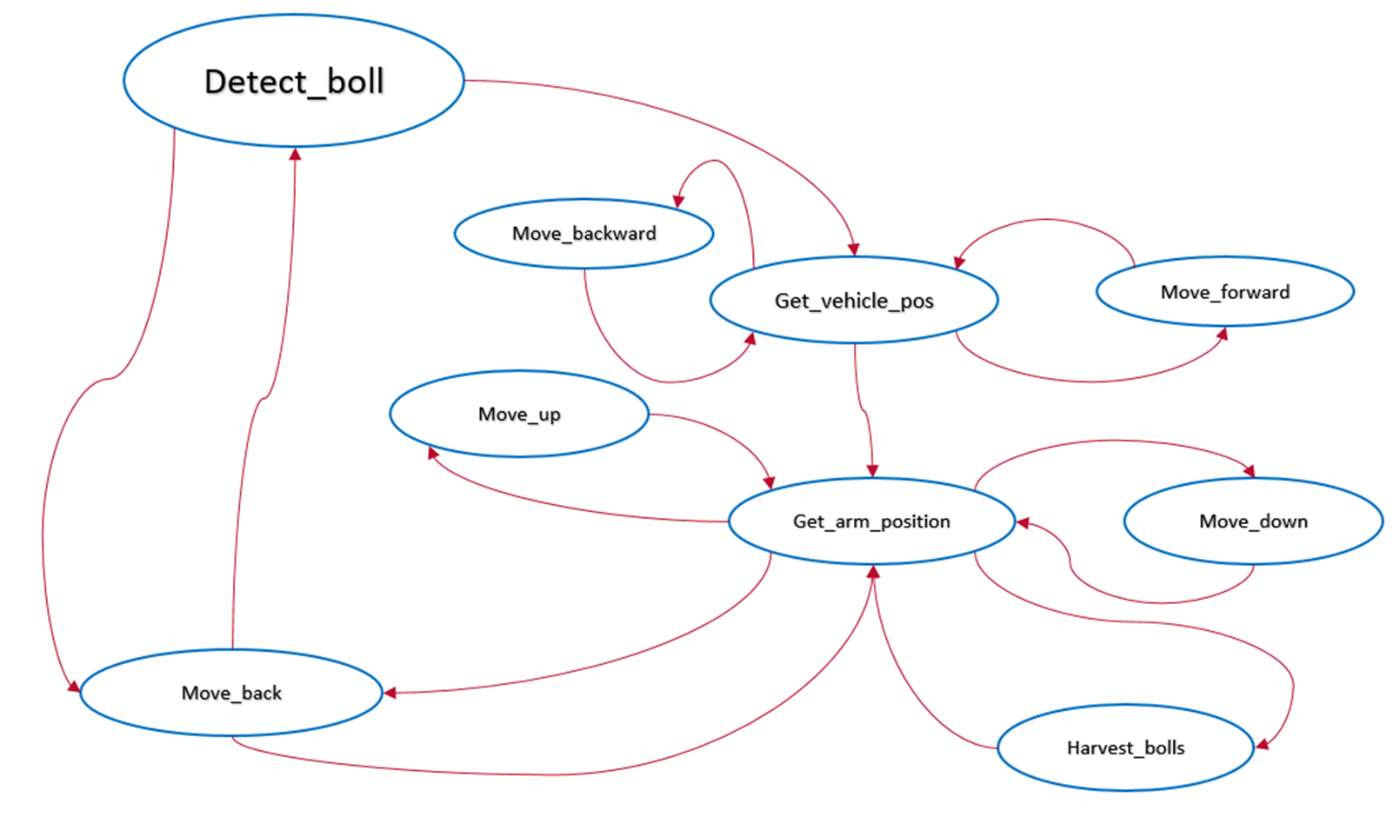
Figure 3. SMACH context diagram showing the main operations of the robotic system design which involves detecting cotton boll, moving forward or back and picking the boll by moving the manipulator up/down/back and forth. (May 2018)
The robotic rover needs to be able to navigate on the farm, see the cotton bolls, and pick them. This is a structured operation since the robot cannot predict the position of the boll before it has seen it. Also, the farming condition is unstructured, where positions and movements can abruptly change when the robotic system is in operation. This may cause inconveniences with robotic operations and for it to remain robust and sustainable needs robust control systems that would be taking care of each operation separately but integrated.
They were able to demonstrate that this arrangement was able to make the machine able to pick cotton bolls by 17.3 seconds a boll. The robotic system was navigating very slow with the speed of 0.87 per second, which is not enough yet but acceptable achievement. This research will be funded for many years to come until the robotic system is achieved for use.
“We don’t know the lifespan but It may take more than 10 years, but the Cotton incorporated is committed to accomplishing the project” said Kadeghe.
However, Kadeghe is planning to graduate in year 2020. This research’s software and codes are shared in GitHub @kadefue and @UGA-AgRobotics. Dr Rains research site can be found here https://gcrains.weebly.com/, and Kadeghe Fue’s site is www.cict.sua.ac.tz/kadefue




